Un ensemble complexe de capteurs, de lasers ainsi qu'un système de géolocalisation dans le cloud. Tels sont les éléments qui permettront au constructeur automobile Volvo Car de mettre des voitures semi-autonomes entre les mains d'une centaine de conducteurs dans les rues de Göteborg, en Suède, d'ici 2017. Ce projet, baptisé « Drive Me », en est à sa deuxième année. La semaine dernière, Volvo Car a donné un aperçu de la technologie qui sera utilisée pour faire fonctionner ces voitures dans des conditions de circulation réelles, avec l'objectif de réduire le nombre d'accidents mortels. Les chauffeurs accéderont à un pilotage automatique sur certaines routes, en tout une cinquantaine d'artères dans et autour de la ville. « La clé du succès vise à combiner des capteurs, des ordinateurs et un système de châssis de façon astucieuse », a déclaré Erik Coelingh, spécialiste technique chez Volvo.
La voiture aura besoin de savoir exactement où elle se trouve, ce que Volvo espère atteindre avec un système de géocalisation précis, disposant d'un angle à 360° sur l'environnement de la voiture. En combinant des radars, des caméras et des capteurs laser multiples, un réseau d'ordinateurs va générer une carte en temps réel des objets fixes et mobiles et fixes situés à proximité de la voiture. En ajoutant la combinaison avec le GPS, la voiture saura exactement où elle est.
Une vue d'ensemble pour détecter d'autres voitures
Volvo prévoit d'utiliser une caméra tri-focale placée derrière la partie supérieure du pare-brise pour repérer des objets. Elles agiront à la manière de trois caméras dans une seule et fourniront une vue d'ensemble afin de détecter des véhicules arrivant sur le côté. Les capteurs aideront le véhicule à déterminer la distance d'un objet, à repérer les piétons apparaissant soudainement et à se prémunir d'autres dangers inattendus, a précisé le constructeur. En outre, un scanner disposant d'un champ de vision ayant une portée de 150 mètres permettra de faire la distinction entre les objets, les autres véhicules et les débris. 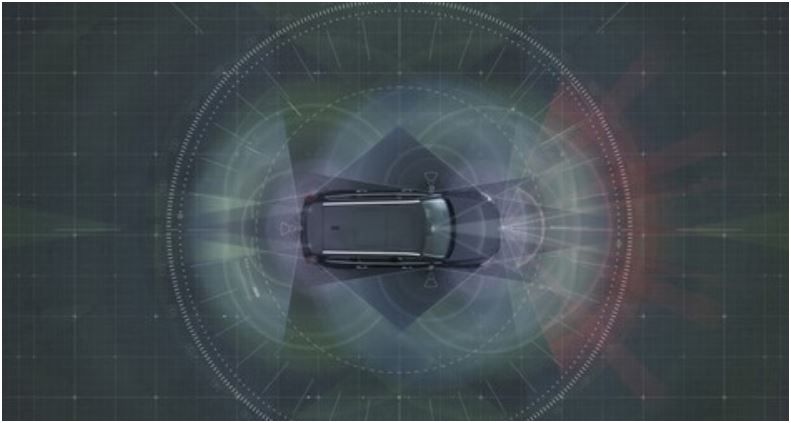
Le véhicule que prépare le constructeur suédois est bardé de radars.
Outre ce qui se passe devant elle, la voiture semi-autonome de Volvo doit également pouvoir enregistrer ce qui se passe sur ses côtés et à l'arrière. C'est pourquoi, elle est équipée d'une caméra et d'un radar à moyenne portée sur chaque coin pour observer l'environnement et mesurer sa distance avec les rails de sécurité et les voitures situées dans les rues adjacentes. Deux radars à longue portée placés dans le pare-chocs arrière de la voiture procurent un bon champ de vision à l'arrière, tandis que douze capteurs à ultrasons autour de la voiture sont utilisés pour identifier les objets proches. Ils permettent également au véhicule de fonctionner de façon autonome en basse vitesse. Pour traiter ces données, la voiture connectée de Volvo est équipée de deux systèmes informatiques indépendants. Si l'un tombe en panne, l'autre disposera des éléments nécessaires pour pouvoir conduire le véhicule vers une aire de sécurité.
Testées sur des routes sélectionnées
Ces voitures sont également reliées via un service cloud au centre de contrôle des autorités de la circulation et disposent d'un lien de communication. Ce dernier permet d'obtenir les dernières données cartographiques et celles sur le trafic. L'un de principaux défis de ce programme porte sur la conception d'un pilote automatique pouvant faire face à des situations d'urgence, a précisé Volvo Car. Par conséquent, ses voitures connectées seront d'abord conduites de manière autonome sur des routes sélectionnées avec des conditions appropriées, comme des autoroutes par exemple, sans circulation en sens inverse, cyclistes, ni les piétons.
Volvo planche sur une voiture autonome pour réduire les accidents
0
Réaction

Le constructeur automobile Volvo Car a démarré un projet pilote visant à mettre une centaine de voitures connectées en circulation dans les rues de Göteborg, en Suède, d'ici 2017.
")
Newsletter LMI
Recevez notre newsletter comme plus de 50000 abonnés
Suivre toute l'actualité
Newsletter
Recevez notre newsletter comme plus de 50 000 professionnels de l'IT!
Je m'abonne
Commentaire